自动上下料机械手直臂与夹持部件三维设计
在当今制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机械手作为自动化生产线上的重要成员,逐渐被企业认同并采用。工业机械手的技术水平和应用程度在一定程度上反映了一个国家的工业自动化水平。目前,工业机器人主要承担着一些烦锁和重复性动作,并且劳动强度极大的工作,工作方式一般采取试教在线的方式。设计一台机械手可以替代人工操作,能够减轻人的工作强度,节约时间,提高效率,可以减少生产成本。
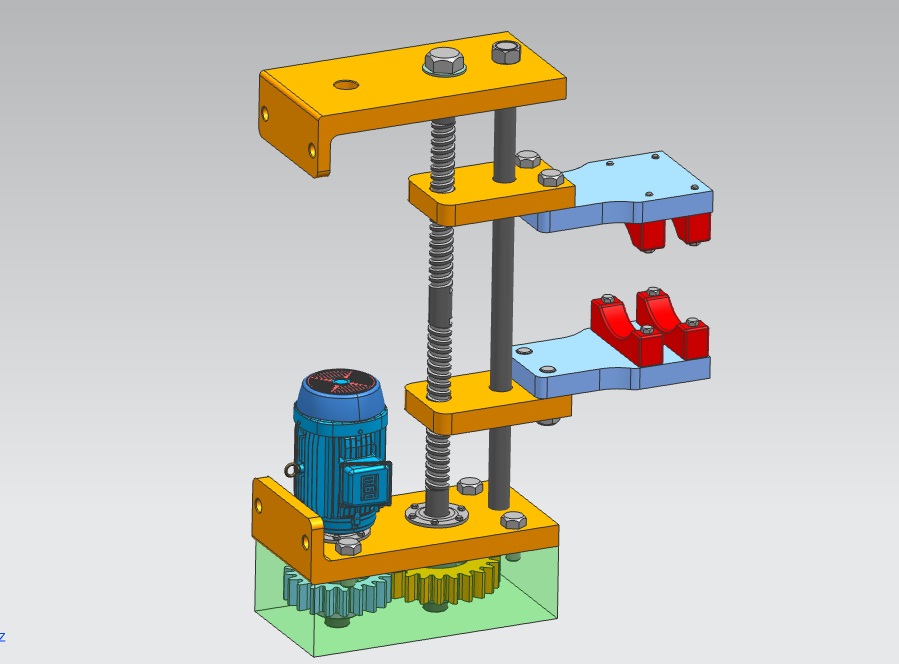
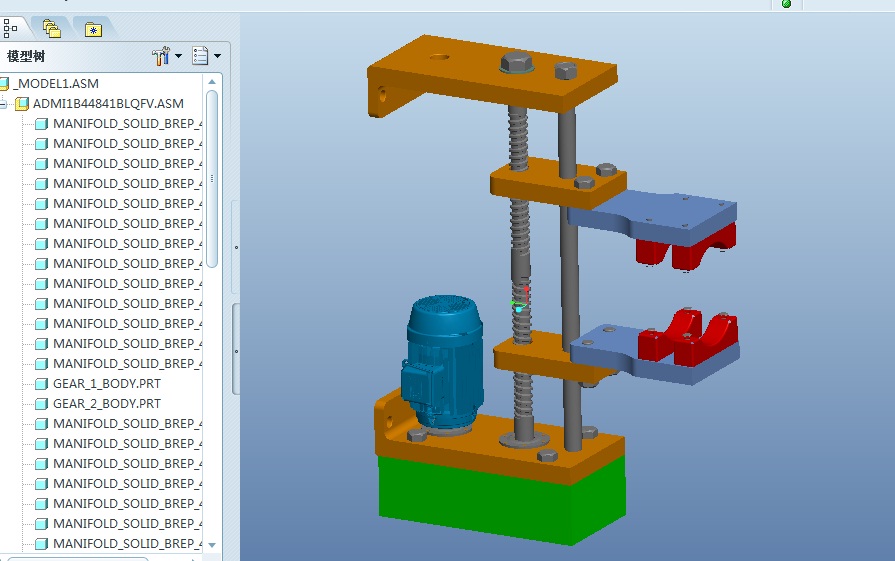
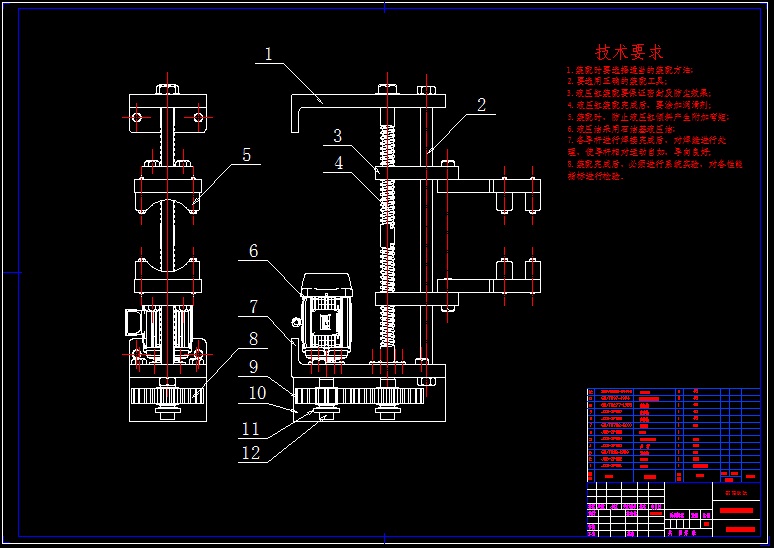
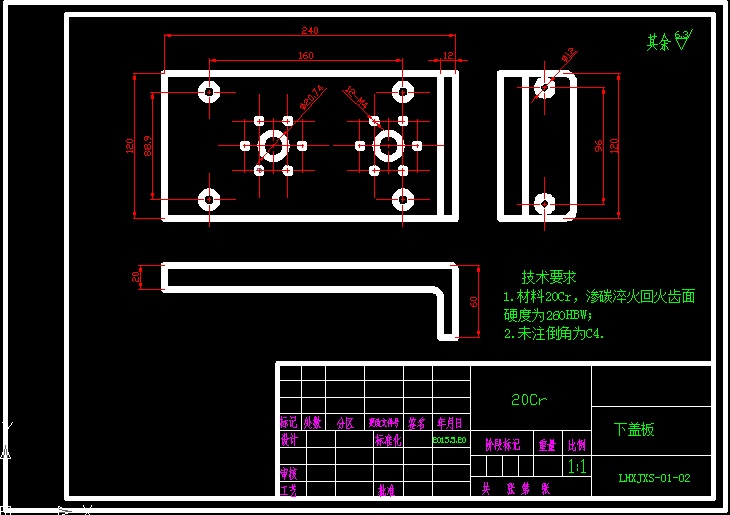
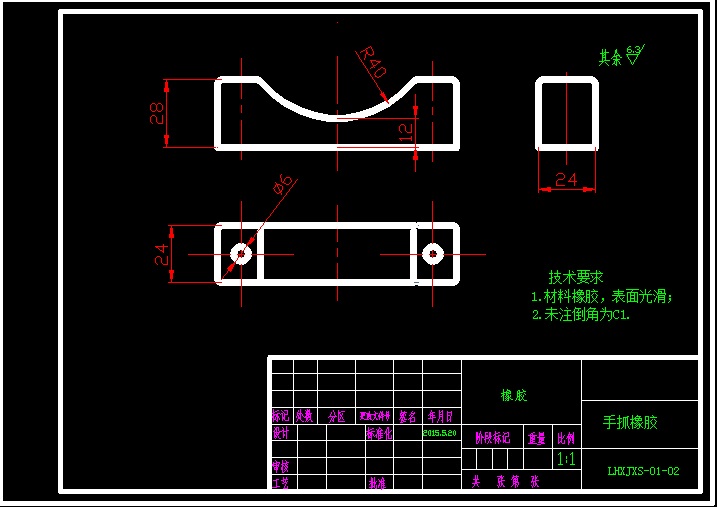
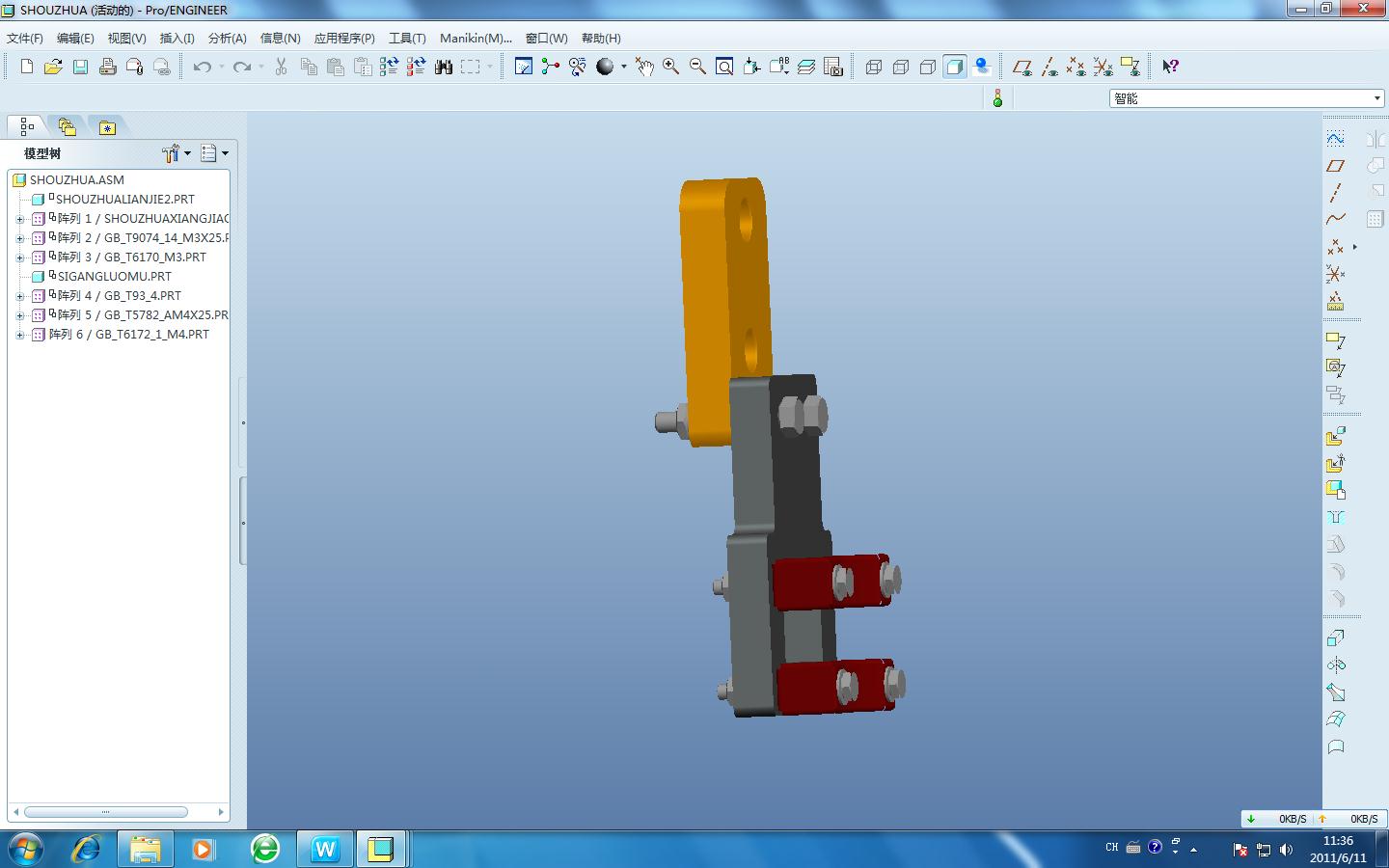
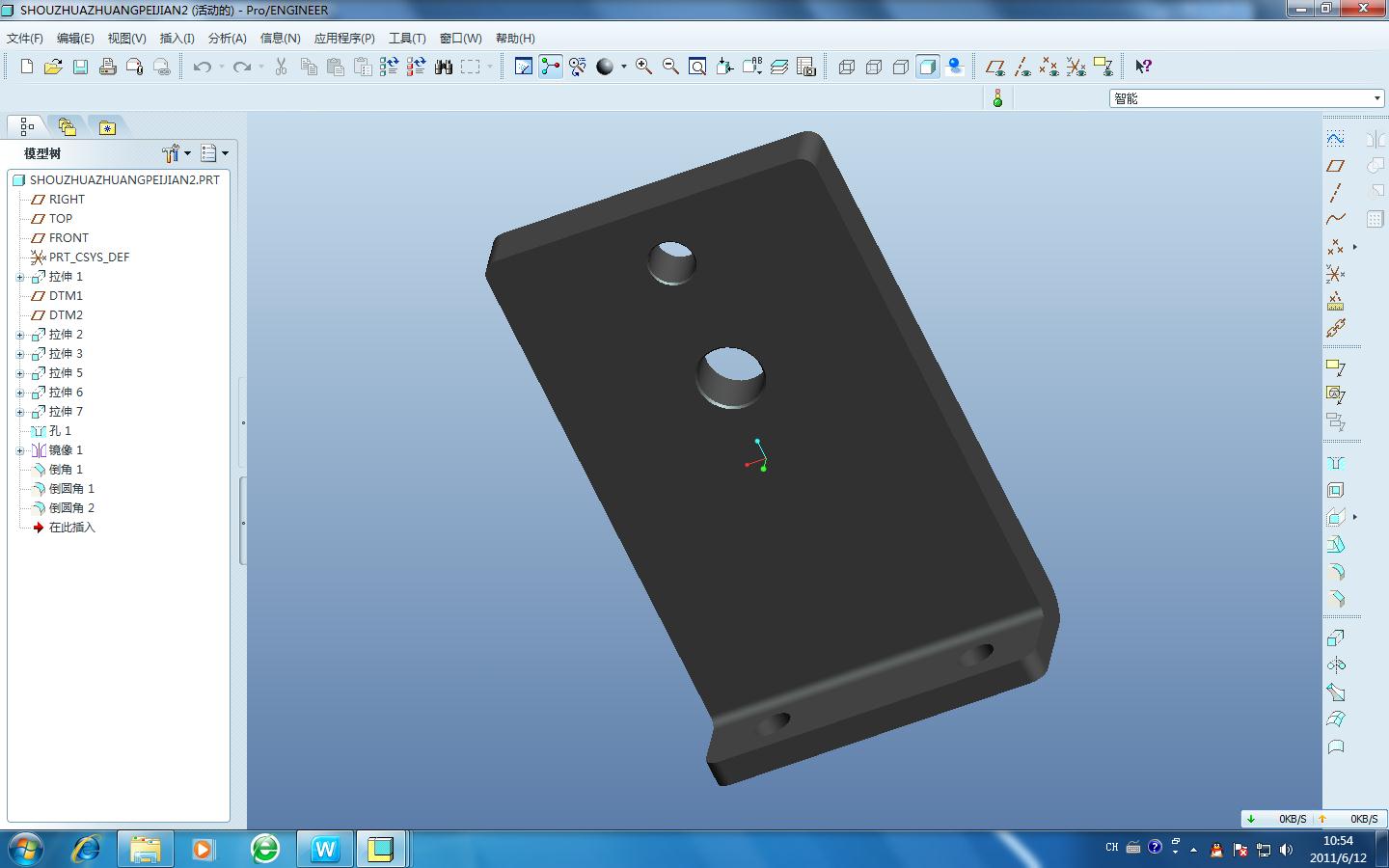
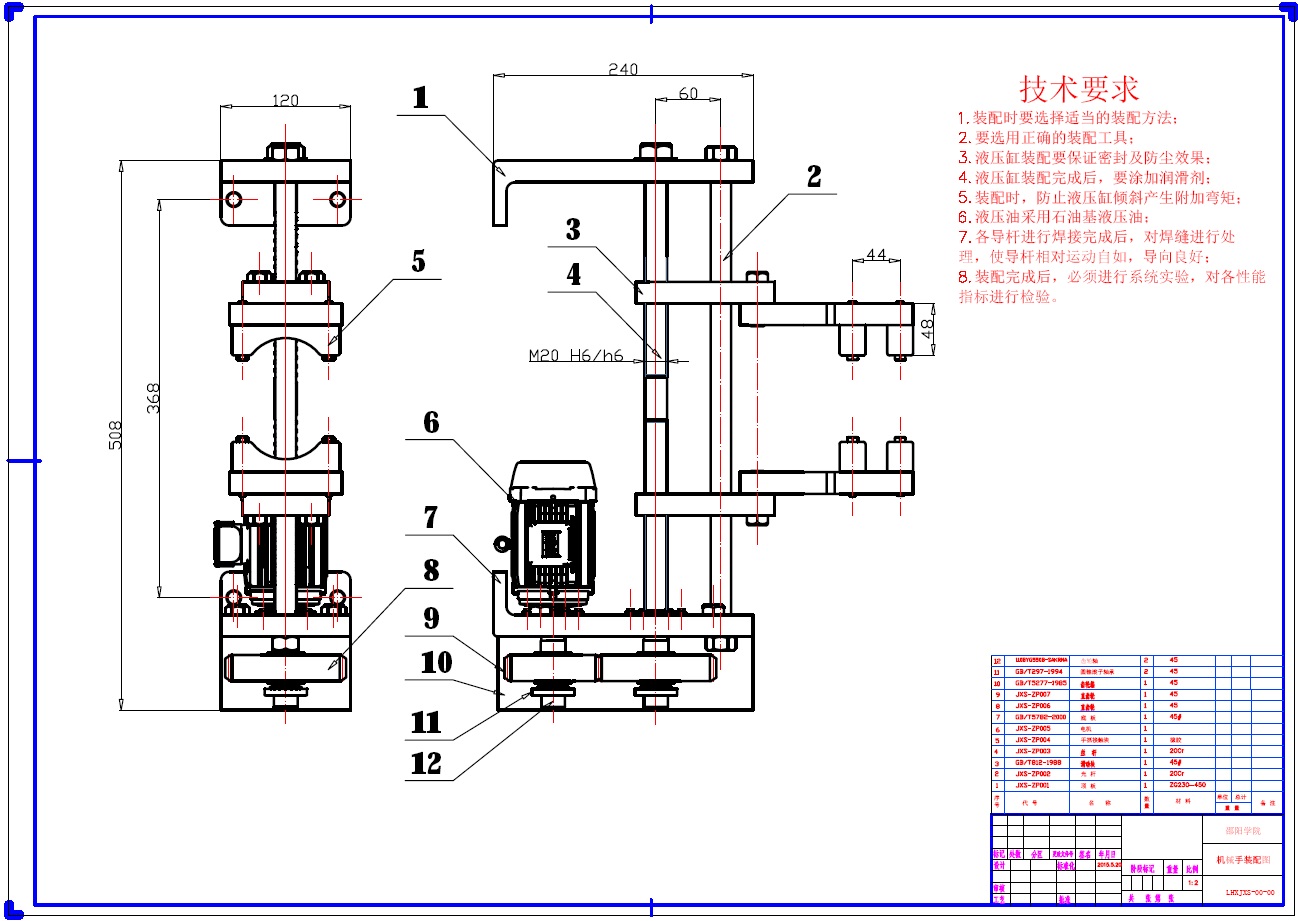
针对上述问题,专门设计一台工业机械手,用于给冲压设配运送物料有非常的必要。首先将使用CAD二维和PRO/E三维软件,对工业机器人的底座、夹紧装置、丝杆、臂部、齿轮等结构。进行二维和三维的设计,在进行三维的虚拟装配,以验证设计的合理性。设计工业机械手在实用方面考虑,设计采用手爪为平移型夹持式手爪,传动结构为滑动丝杆,驱动为电机驱动,结构简单易实现,精度方面也相对较高。最后选择合适的传动方式,驱动方式,搭建工业机器人的结构平台。完成本次课题的设计
说明书